Özel Gripperlar
Gripper (Tutucu)
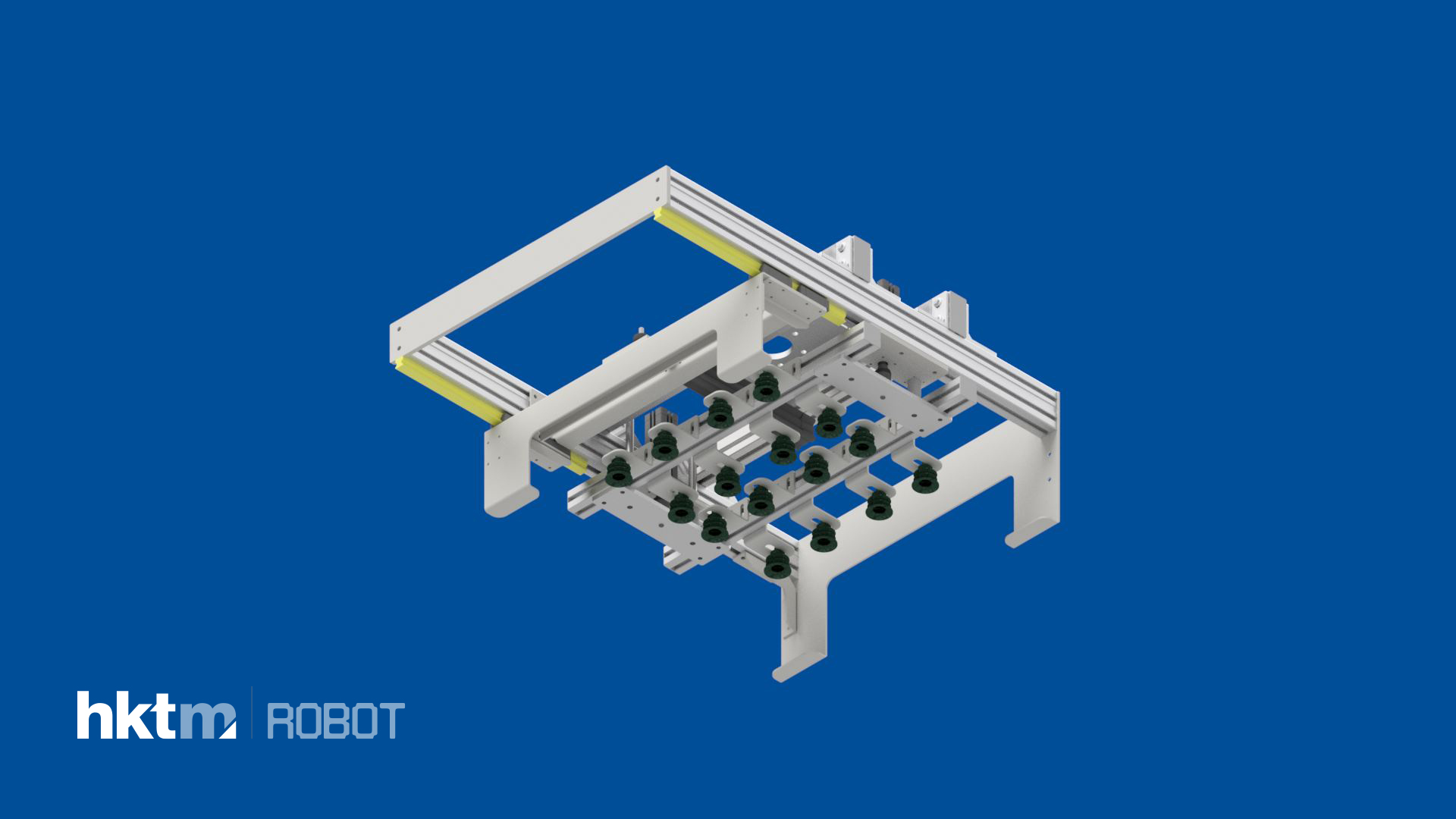
Robotlar ancak Gripper (tutucu) yardımıyla iş sürecinde mal ve bileşenleri toplayabilir, taşıyabilir, konumlandırabilir, işleyebilir, sıralayabilir, istifleyebilir ve depolayabilir.Bu kavrama sistemleri, sayesinde parçalar yumuşak bir şekilde monte edilebilir, bir yere eklenebilir ya da çıkarılabilir. HKTM olarak gripperlarda kendini ispatlamış global gripper ekipmanlarını kullanmaktayız. Ürün ve kalıbınız incelenerek, birden çok kalıba uygun tek bir gripperın tasarlanıp tasarlanamayacağı ile ilgili bilgi paylaşımının ardından söz konusu gripperın tasarım ve üretim işlemleri HKTM tarafından gerçekleştirilebilmektedir.
HKTM tasarım departmanı, plastik enjeksiyon sektörüne yönelik, robot ile birlikte yaptırmayı planladığınız gripper tasarımları için kalıp ve ürünlerinizin üç boyutlu çizimlerinin paylaşılması halinde; gripperın tasarım, üretim ve montajı yapılıp sahada robot ile beraber devreye alınmaktadır.
Ar-Ge bölümümüzün oluşturduğu 2 tip özel tutucumuz bulunmaktadır.
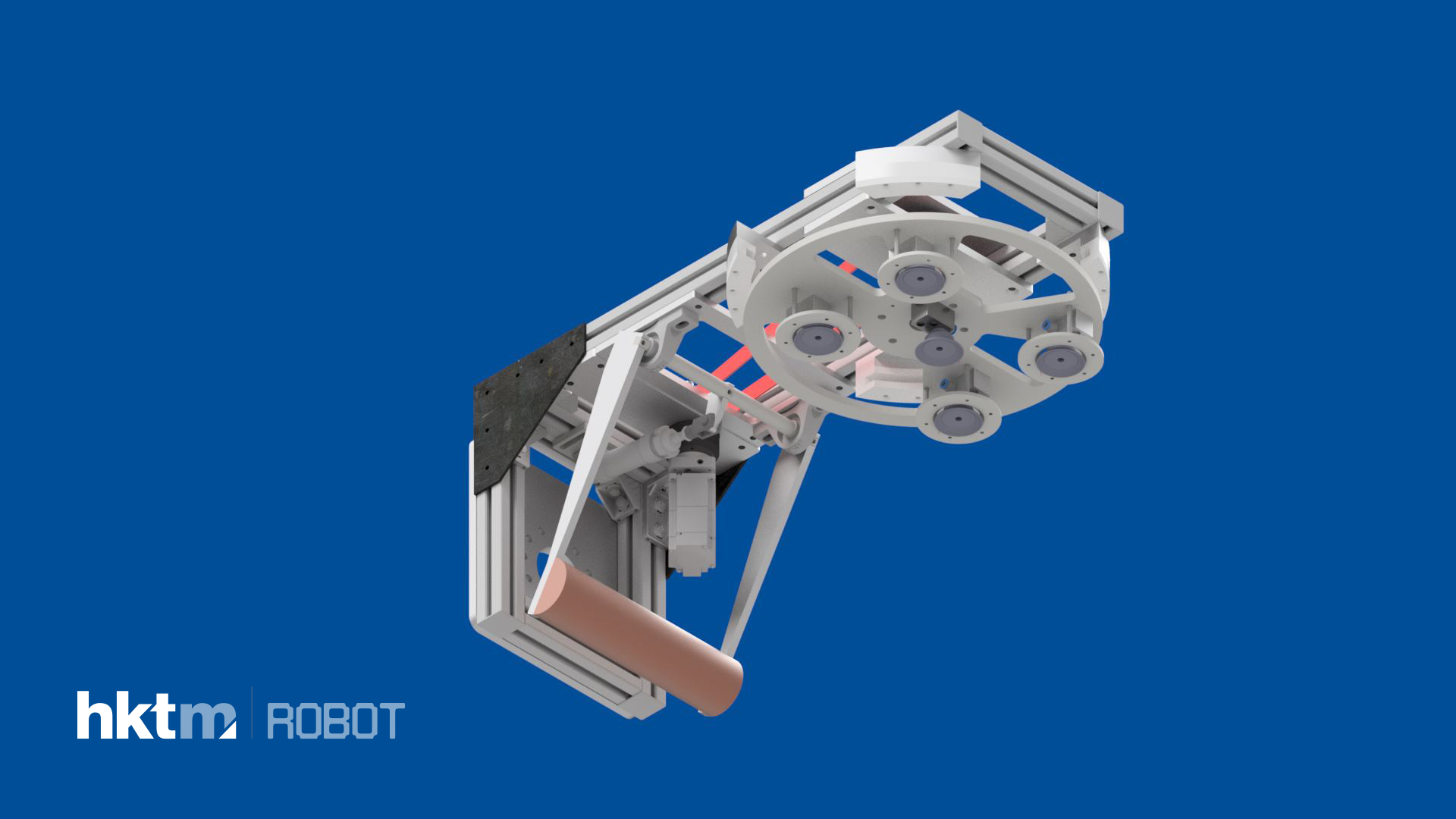
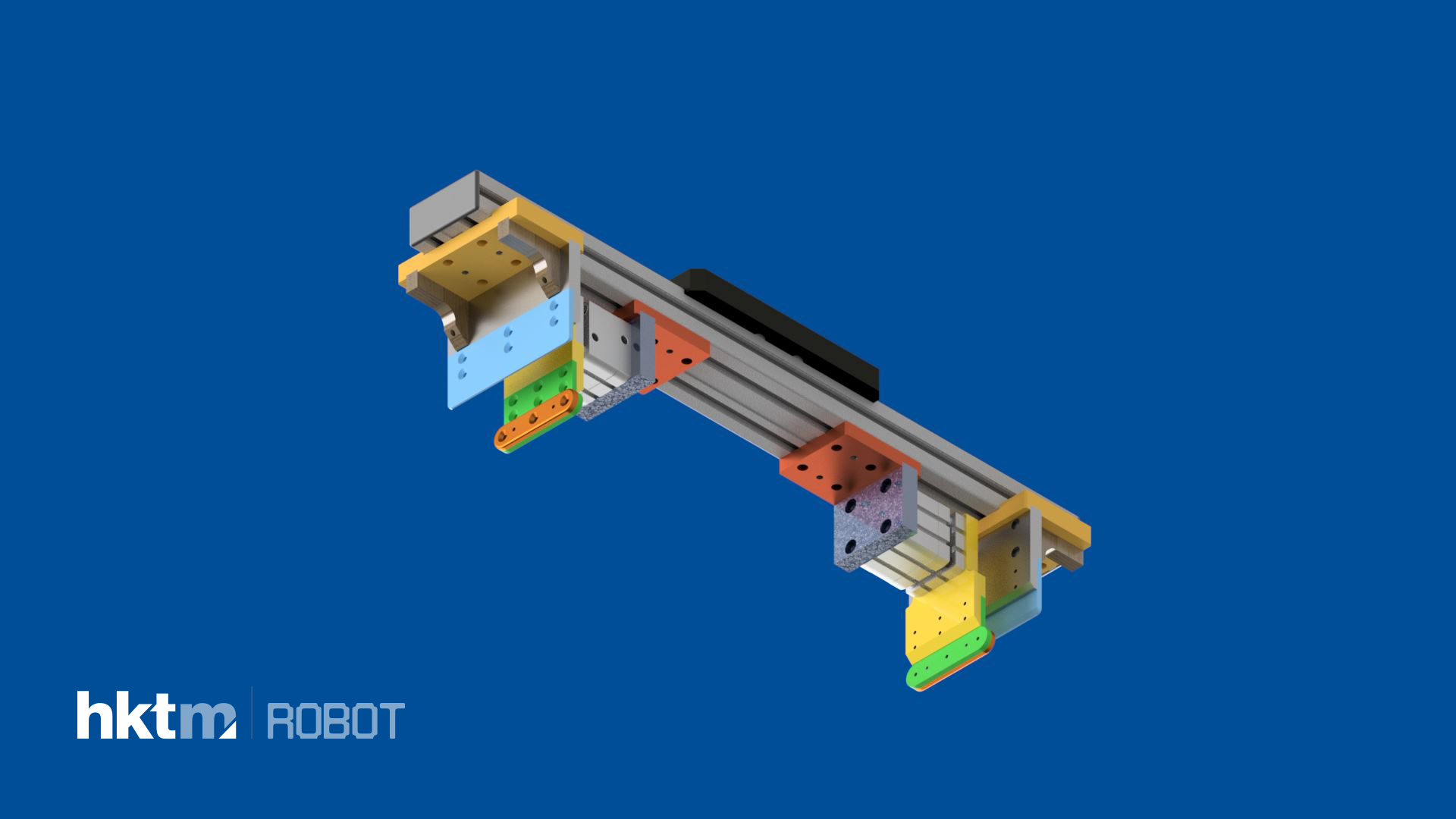
Çok Bölgeli Elektrostatik Tutucu
Günümüzde kullanılan robotik tutucular, kontrol kolaylığı, yüksek kuvvet ve yüksek hassasiyet gibi amaçlara ulaşabilir şekilde tasarlanıp üretilmelerine rağmen; kumaş, kağıt, karton, bazı polimerler gibi eğilebilir ya da yumuşak cisimleri tutmakta zorlanmaktadırlar.
HKTM yürüttüğü Ar-Ge çalışmaları ile geliştirdiği PATENTLİ elektrostatik adezyon tabanlı çok bölgeli elektroadhezif tutucuları ile kumaş, kağıt, karton, bazı polimerler gibi eğilebilir ya da yumuşak cisimleri tutabilmeyi ve bu sektörlerde de robotik çözümleri yaygınlaştırmayı hedeflemektedir. Özel patentli teknoloji sayesinde çok bölgeli kontrol edilebilir elektrostatik tutma özelliğinin oluşmasını sağlar ve cisimlere zarar vermeden elektrostatik çekim kuvvetinden faydalanarak tutma işlemini yerine getirir.
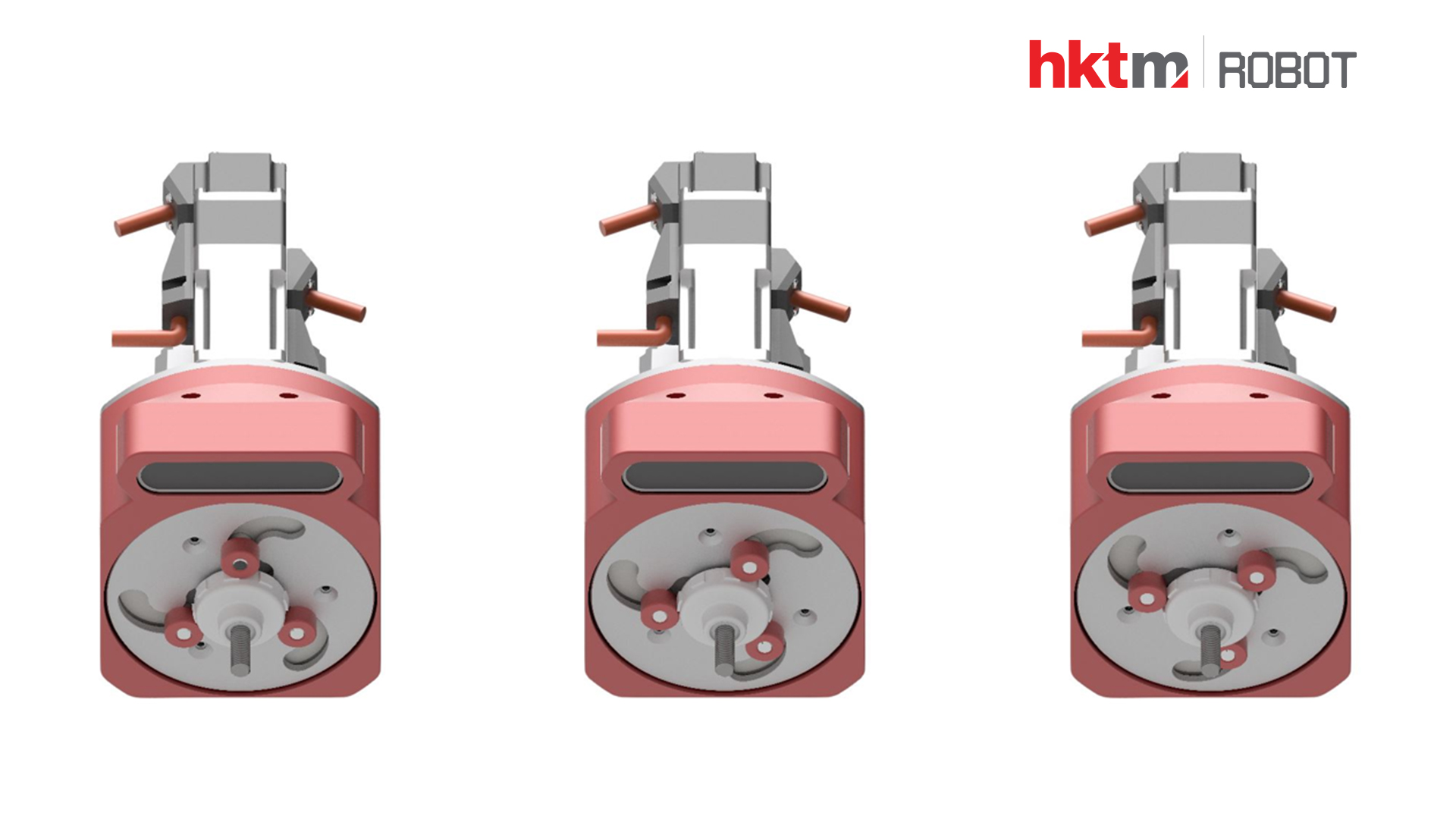
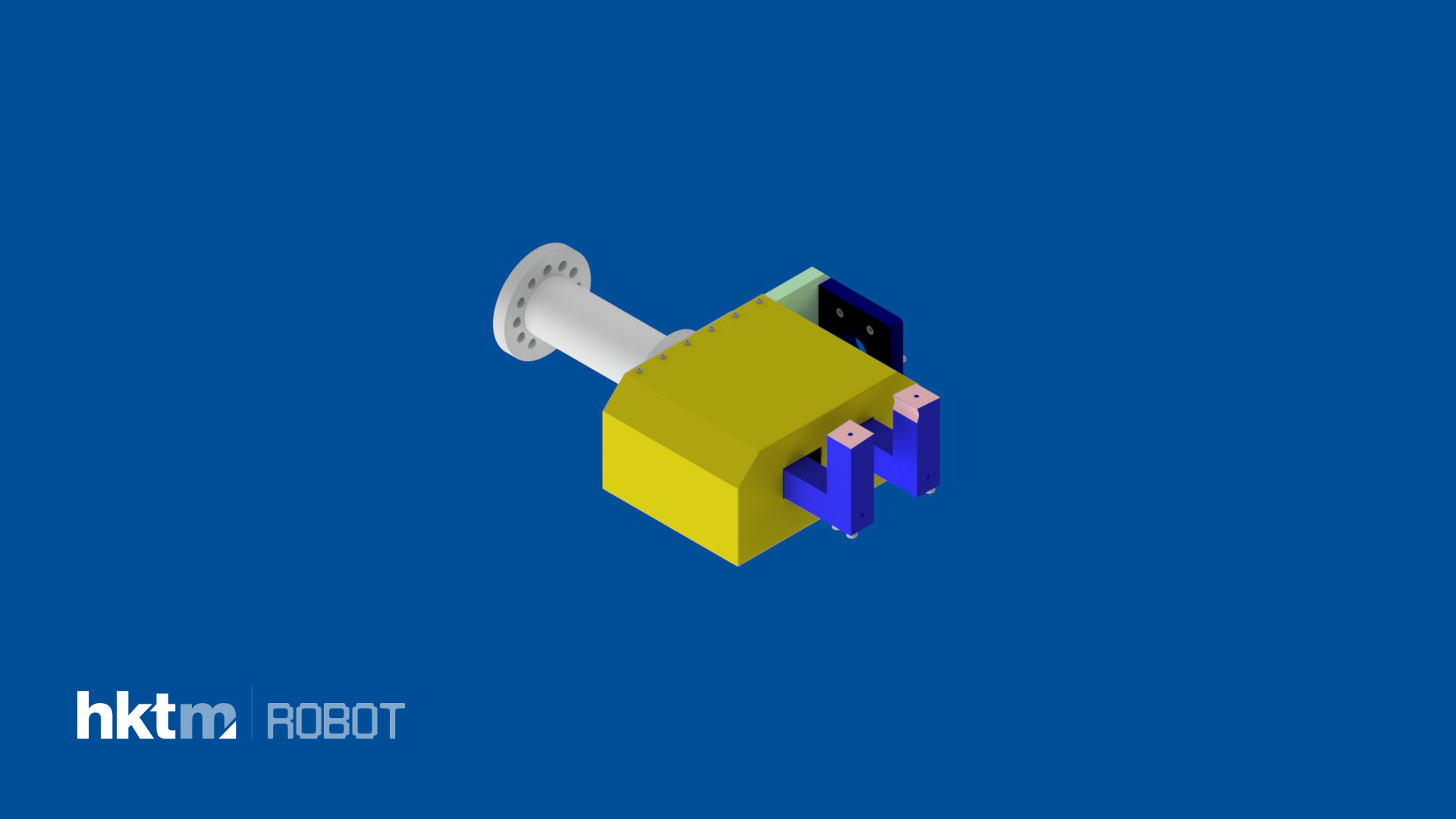
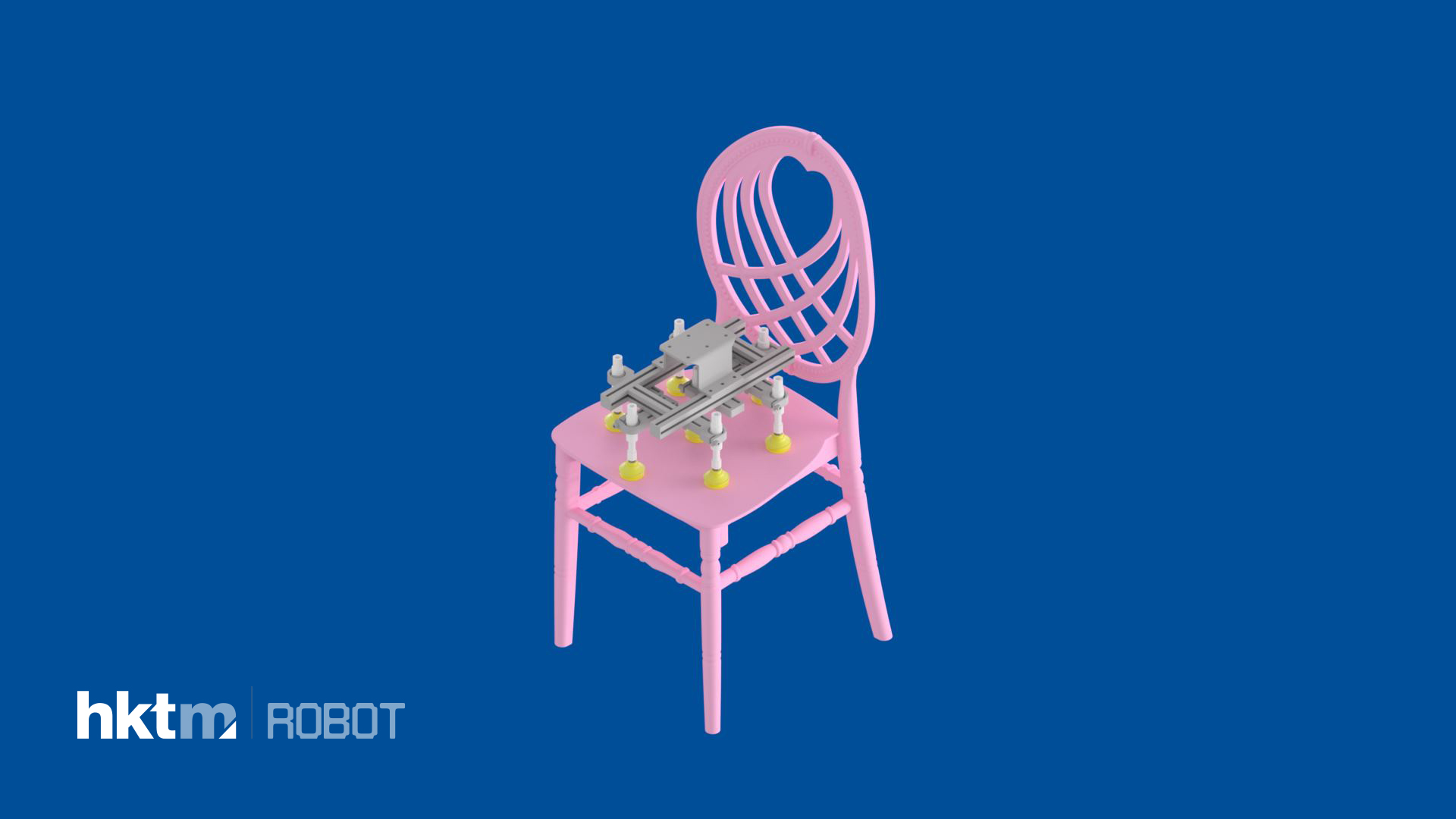
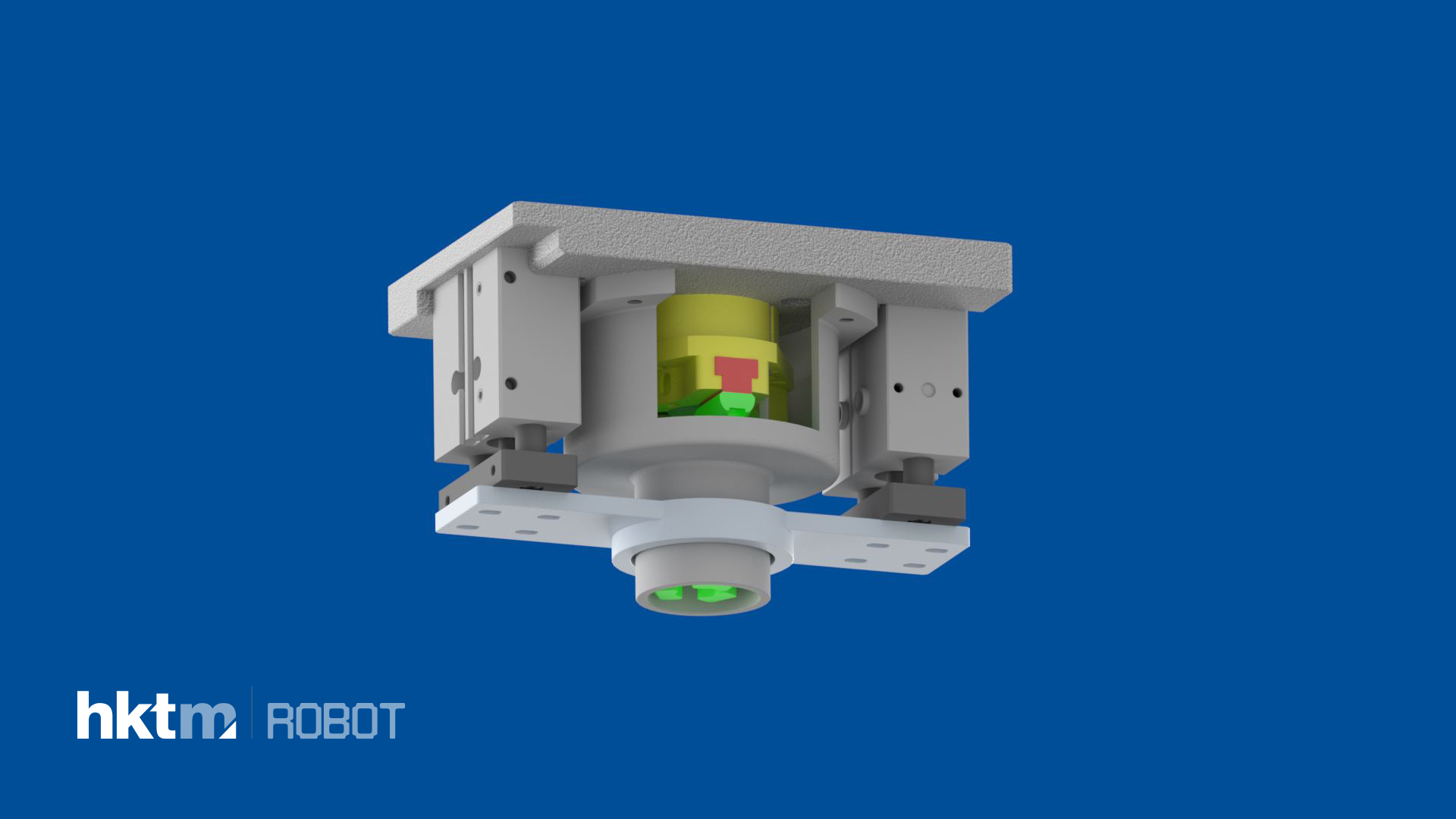
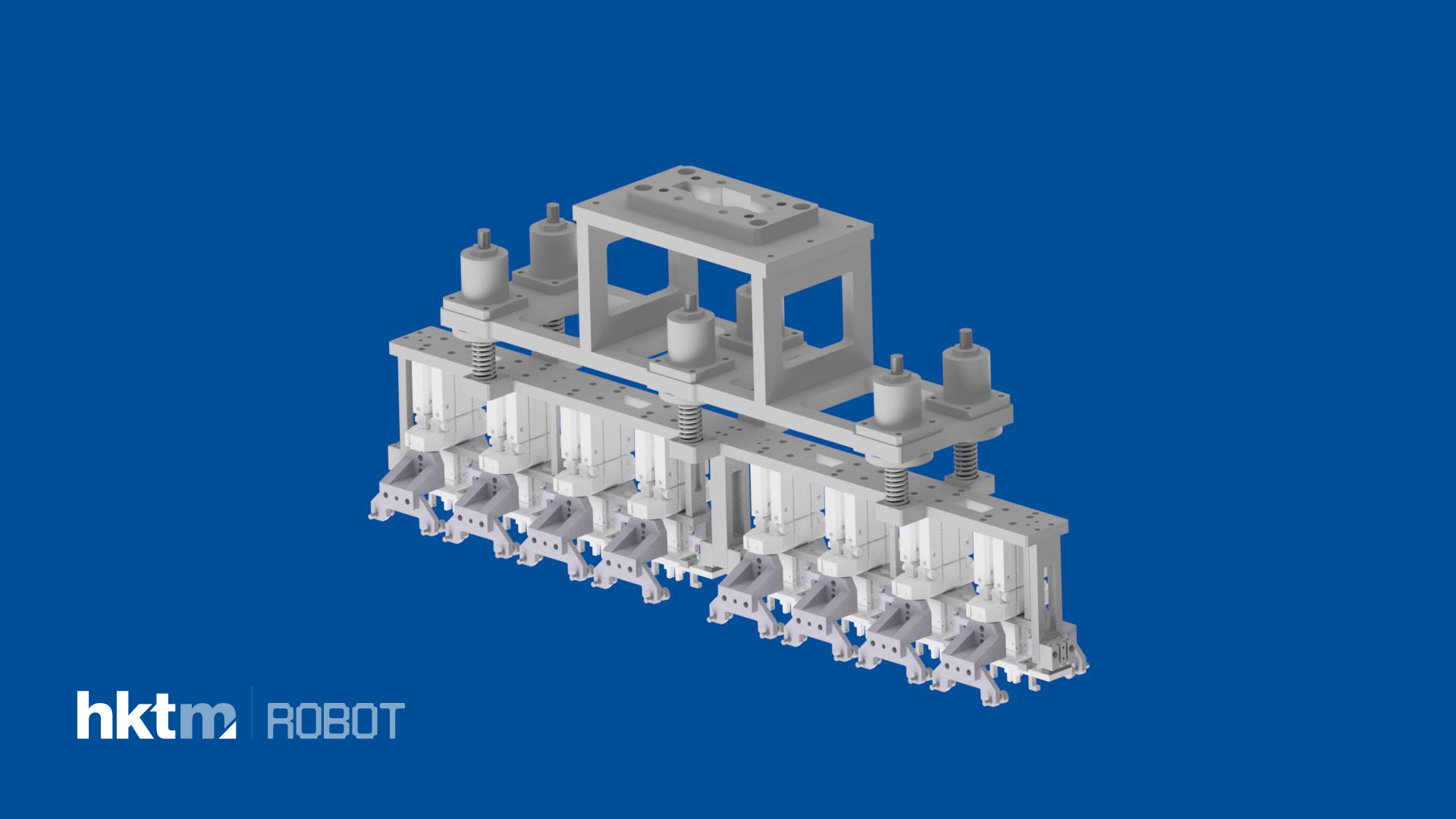
Çok Serbestlik Dereceli Tutma ve Vidalama Sistemleri
Özellikle beyaz eşya ve benzeri sektörlerde sıkça karşılaşılan ayarlı ayak vb. parçaların tutulması ve vidalanması operasyonlarının başarılı bir şekilde yerine getirilmesini sağlamak için geliştirilmiştir. Tutucu üzerinde tutma ve vidalama operasyonlarını yerine getirebilecek birden fazla serbestlik derecesine sahip patentli bir mekanizma bulunmaktadır. Tutma ve vidalama işlemlerinin yanı sıra tutucu üzerinde bulunan görsel kontrol sistemi sayesinde gelişmiş görüntü işleme algoritmaları ile hat üzerinde ürünün vida deliğinin pozisyonu analiz edilir ve gerekli olması durumunda önceden tanımlı vidalama koordinatı güncellenerek vidalama işleminin doğru noktada yapılması sağlanır.